|
|

|

|
| e-Pub |
Section: New Results
Decision Making in Multi-Robot Systems
Multi-robot path-planning and patrolling
Patrolling under connectivity constraints
Participants : Olivier Simonin, Anne Spalanzani, Mihai Popescu, Fabrice Valois [Inria, Agora (ex Urbanet) team] .
Patrolling is mainly used in situations where the need of repeatedly visiting certain places is critical. In this work, we consider a deployment of fixed targets, eg. wireless sensors, that several robots are in charge of patrolling while they have to maintain their (periodic) connectivity in order to collect and bring data up to a sink node. We have shown that this is fundamentally a problem of vertex coverage with bounded simple cycles (CBSC). We offered a formalization of the CBSC problem and proved it is NP-hard and at least as hard as the Traveling Salesman Problem (TSP). Then, we provided and analyzed heuristics relying on clusterings and geometric techniques. The proposed approach relies on two steps: the first one partitions the vertices, the second one computes hamiltonian cycles on each partition. We implemented two classic hamiltonian cycle heuristics, one is based on Minimum Spanning Trees computations and the other on Christofides algorithm. Comparisons on randomly-generated graphs showed that the Christofides algorithm computes shorter cycles. This work, started in the Master internship of Mihai-Ioan Popescu, now continuing as PhD student in Chroma, has been published in 2016 in [25]. Work is now focusing on the problem of synchronizing robots to meet at intersection nodes between the cycles.
Another important element of this work is the construction of a new collaboration with the team of Gabriela Czibula in Babes-Bolyai University at Cluj-Napoca (Romania). It will focus on optimization and online adaptation of the multi-cycle patrolling with machine learning (RL) techniques in order to deal with the arrival of new targets in the environment. We obtained, in the end of 2016, a french-romanian PHC (Hubert Curien Partnership) bilateral project, called DRONEM, funding students and researchers exchanges during two years.
|

Patrolling moving people (dynamic patrolling)
Participants : Jacques Saraydaryan, Fabrice Jumel, Olivier Simonin.
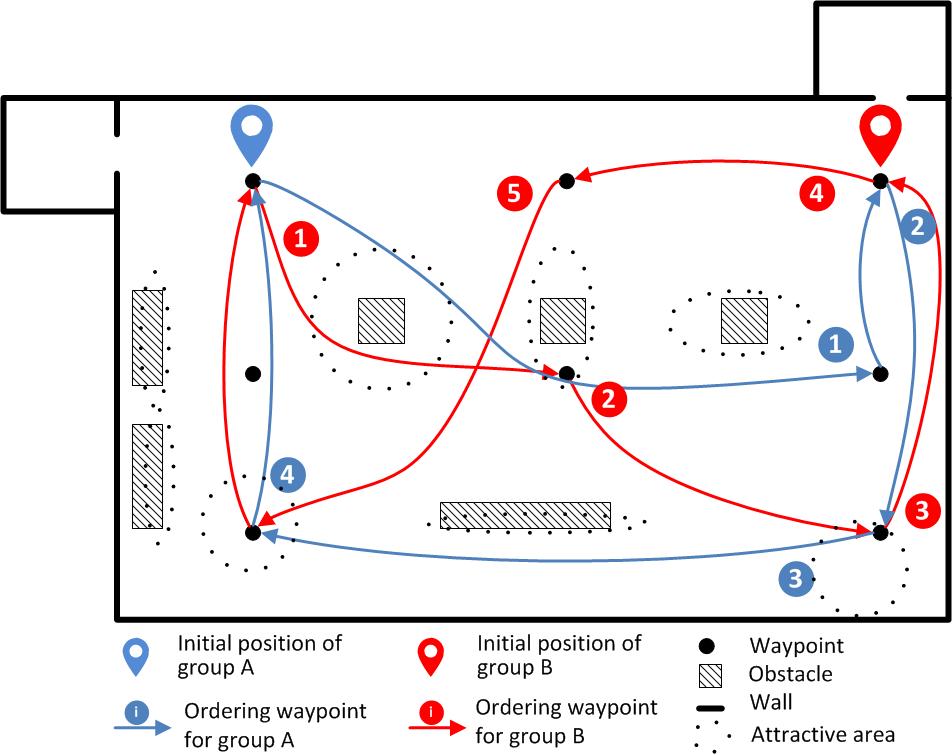
In the context of service robotics, we address the problem of serving people by a set of collaborating robots, that is to delever regularly services to moving people. We showed that the problem can be formally expressed as a dynamic patrolling task. We call it the robot-waiters problem, where robots have to regularly visit all the moving persons (to deliver objects/information). In the publication [87], we proposed different criteria and metrics suitable to this problem, by considering not only the time to patrol all the people but also the equity of the delivery. We proposed and compared four algorithms, two are based on standard solutions to the static patrolling problem and two are defined according the specificity of patrolling moving entities, in particular greedy-based solutions on distance and idleness people information. In order to limit robot traveled distances, the last approach introduces a clustering heuristic to identify groups among people. To compare algorithms and to prepare real experiments we evaluated performances by using our simulator (combining PedSim and ROS). The simulator and the scenrio test - paths followed by humans - are illustrated in figure 15.a and 15.b. Experimental results show the efficiency of the specific new approaches over standard (static patrolling) approaches. We also analysed the influence of the number of robots on the performances, showing a convergence of performances when it grows. See [87] and extensions in 2016 [28].
We are currently developping new algorithms using the mapping and prediction of human flows based on the work presented in section 7.4.2 to allow robots to predict where human (groups) will move (under hypothesis of repetitive behaviors).
Global-local optimization in autonomous multi-vehicles systems
Participants : Olivier Simonin, Jilles Dibangoye, Laetitia Matignon, Florian Peyreron [VOLVO Group, Lyon] , Guillaume Bono, Olivier Buffet [Inria Nancy Grand Est] , Mohamed Tlig [IRT-Systemx, Paris] .
We address transport and traffic management problems with driverless vehicles. We mainly study how local decisions can improve complexity of global (planning) solutions.
A previous work carried in the PhD of M. Tlig [96] concerned stop-free crossing roads with driverless vehicles. We explored distributed algorithms to optimize the global traffic in the road network (time and energy), based on Hill-Climbing techniques, so as to go from a synchronization within each intersection to the synchronization of a network. Experiments in simulation showed that proposed algorithms can efficiently optimize the initial decentralized solution, while keeping its properties (only the temporal phase for crossing in each intersection is modified). In 2016 we extended the experimental study, which was published in the RIA revue [13] and submited to an international journal.
In 2016, we started a new cooperation with the VOLVO Group, in the context of the INSA-VOLVO Chair. It funds the PhD thesis of G. Bono which deals with global-local optimization under uncertainty for goods distribution using a fleet of autonomous vehicles. First months of the thesis focused on building i) a state of the art about online pick-up and delivery solutions with a fleet of autonomous vehicles and ii) defining formally the scenario and hypothesis of the considered problem.
Anytime algorithms for multi-robot cooperation
Complex scenes observation
Participants : Olivier Simonin, Laetitia Matignon, Christian Wolf [LIRIS, INSA Lyon] , Simon Bultmann [internship] , Stefan Chitic.
|

Solving complex tasks with a fleet of robots requires to develop general strategies that can decide in real time (or time-bounded) efficient and cooperative actions. This is particularly challenging in complex real environments. To this end, we explore anytime algorihms and adaptive/learning techniques.
The "Crome" (Coordination d'une flottille de robots mobiles pour l'analyse multi-vue de scènes complexes) project (Funded by an INSA BQR in 2014-2015 (led by O. Simonin) and a LIRIS transversal project in 2016-2017 (led by L. Matignon)) is motivated by the exploration of the joint-observation of complex (dynamic) scenes by a fleet of mobile robots. In our current work, the considered scenes are defined as a sequence of activities, performed by a person in a same place. Then, mobile robots have to cooperate to find a spatial configuration around the scene that maximizes the joint observation of the human pose skeleton. It is assumed that the robots can communicate but have no map of the environment and no external localization.
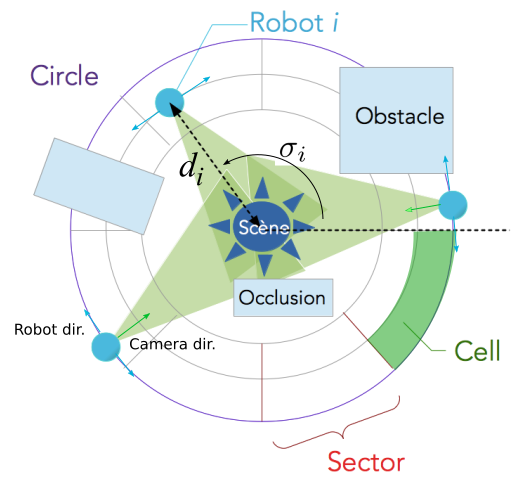
To attack the problem, in cooperation with colleagues from vision (C. Wolf, Liris), we proposed an original concentric navigation model allowing to keep easily each robot camera towards the scene (see fig. 16.a). This model is combined with an incremental mapping of the environment and exploration guided by meta-heuristics in order to limit the complexity of the exploration state space. We developped a simulator that uses real data from real human pose captures to simulate dynamic scene and noise in sensor information. A video presenting the simulator interface and showing the incremental exploration and mapping can be found at . Results have been published in 2016 in [20] (ICTAI). It compares the variants of the approach and shows its features such as adaptation to the dynamic of the scene and robustness to the noise in the observations.
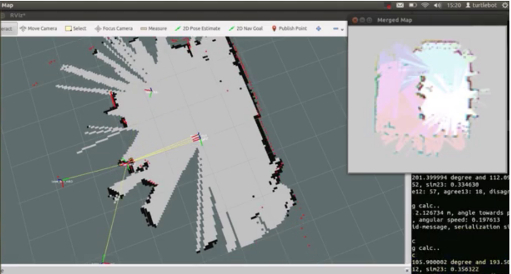
We have also developped an experimental framework for the circular navigation of several Turtlebot2 robots around a scene, presented in figure 16.b. Especially, given that we assume in our work that robots have no map of the environment, we implemented a cooperative multi-robot mapping based on the merging of occupancy grid maps. Robots are individually building and communicating to other robots their local maps. Each robot tries to align these local maps to compute a joint, global representation of the environment. We carried out the map-merging by adapting several methods known in literature [86] to our specific topology, i.e. the single hypothesis of a common center point (the scene) shared by robots. We compared the methods in real-world multi-robot scenarios (see Simon Bultmann's internship report).
Middleware for open multi-robot systems
Participants : Stefan Chitic, Julien Ponge [CITI, Dynamid] , Olivier Simonin.
Multi-robots systems (MRS) require dedicated tools and models to face the complexity of their design and deployment (there is no or very limited tools/middleware for MRS). In the context of the PhD work of S. Chitic, we address the problem of neighbors and service discovery in an ad-hoc network formed by a fleet of robots. Robots needs a protocol that is able to constantly discover new robots in their coverage area. This led us to propose a robotic middleware, SDfR, that is able to provide service discovery. This protocol is an extension of the Simple Service Discovery Protocol (SSDP) used in Universal Plug and Play (UPnP) to dynamic networks generated by the mobility of the robots. Even if SDfR is platform independent, we proposed a ROS integration in order to facilitate the usage. We evaluated a series of overhead benchmarking across static and dynamic scenarios. Eventualy, we experimented some use-cases where our proposal was successfully tested with Turtlebot 2 robots. Results have been pubished in [19]. In 2016, the work continued by the definition of a timed automata based design and validation tool-set, that offers a framewok to formalize and implement multi-robot behaviors and to check some (temporal) properties.
Sequential decision-making under uncertainty
The holy grail of Artificial Intelligence (AI)—creating an agent (e.g., software, robot or machine) that comes close to mimicking and (possibly) exceeding human intelligence—remains far off. But past years have seen breakthroughs in agents that can gain abilities from experience with the environment, providing significant advances in the society and the industries including: health care, autonomous driving, recommender systems, etc. These advances are partly due to single-agent planning and (deep) reinforcement learning, that is, AI research subfields in which the agent can describe its world as a Markov decision process. Some stand-alone planning and reinforcement learning (RL) algorithms (e.g., Policy and Value Iteration, Q-learning) are guaranteed to converge to the optimal behavior, as long as the environment the agent is experiencing is Markovian. Although Markov decision processes provide a solid mathematical framework for single-agent planning and RL, they do not offer the same theoretical grounding in multi-agent systems, that is, groups of autonomous, interacting agents sharing a common environment, which they perceive through sensors and upon which they act with actuators. Multi-agent systems are finding applications everywhere today. At home, in cities, and almost everywhere, we are surrounded by a growing number of sensing and acting machines, sometimes visibly (e.g., robots, drones, cars, power generators) but often imperceptibly (e.g., smartphones, televisions, vacuum cleaners, wash- ing machines). Before long, through the emergence of a new generation of communication networks, most of these machines will be interacting with one another through the internet of things. In contrast to single-agent systems, when multiple agents interact with one another, how the environment evolves depends not only upon the action of one agent but also on the actions taken by the other agents, rendering the Markov property invalid since the environment is no longer stationary. In addition, a centralized (single-agent) control authority is often inadequate, because agents cannot (e.g., due to communication cost, latency or noise) or do not want (e.g., in competitive or strategic settings) to share all their information all the time. This raises a simple fundamental question: how to design a general algorithm for efficiently computing rational policies for a group of cooperating or competing agents in spite of stochasticity, limited information and computational resources? The remainder of this section points out some of the main results of the year to this question as well as ongoing projects.
Optimally solving cooperative games as continuous Markov decision processes
Participants : Jilles S. Dibangoye, Olivier Buffet [Inria Nancy] , Christopher Amato [Univ. New Hampshire] , François Charpillet [Inria Nancy, Larsen team] .
Decentralized partially observable Markov decision processes (Dec-POMDPs) provide a general model for decision-making under uncertainty in decentralized settings, but are difficult to solve optimally (NEXP-Complete). As a new way of solving these problems, we introduce the idea of transforming a Dec-POMDP into a continuous-state deterministic MDP with a piecewise-linear and convex value function. This approach makes use of the fact that planning can be accomplished in a centralized offline manner, while execution can still be decentralized. This new Dec-POMDP formulation, which we call an occupancy MDP, allows powerful POMDP and continuous-state MDP methods to be used for the first time. To provide scalability, we refine this approach by combining heuristic search and compact representations that exploit the structure present in multi-agent domains, without losing the ability to converge to an optimal solution. In particular, we introduce a feature-based heuristic search value iteration (FB-HSVI) algorithm that relies on feature-based compact representations, point-based updates and efficient action selection. A theoretical analysis demonstrates that FB-HSVI terminates in finite time with an optimal solution. We include an extensive empirical analysis using well-known benchmarks, thereby demonstrating that our approach provides significant scalability improvements compared to the state of the art. This work has been published in JAIR journal [11].
Optimally solving two-person zero-sum partially observable stochastic games: a convex optimization approach
Participants : Jilles S. Dibangoye, Olivier Buffet [Inria Nancy] , Mihai Indricean [INSA Lyon internship] .
This work proposes a novel theory and algorithms to optimally solving a two-person zero-sum POSGs (zs-POSGs). That is a general framework for modeling and solving two-person zero-sum games (zs-Games) with imperfect information. Our theory builds upon the result demonstrating that the original problem is reducible to a zs-Game—but now with perfect information. In this form, we show that the dynamic programming theory applies. In particular, we extended Bellman equations [39] for zs-POSGs, and coined them maximin (resp. minimax) equations. Even more importantly, we demonstrated Von Neumann & Morgenstern’s minimax theorem [99] [100] holds in zs-POSGs. We further proved that value functions—solutions of maximin (resp. minimax) equations—yield special structures. More specifically, the maximin value functions are convex whereas the minimax value functions are concave. We also showed how our results apply to more restrictive settings, essentially leading to more concise information. Together these findings allow us to introduce a key algorithm avoiding exhaustive enumeration of doubly exponentially many pure strategies, as suggested so far. We further illustrate the use of our algorithm through numerical examples.
Decentralized Markov decision processes in open systems: models and first algorithms
Participants : Jilles S. Dibangoye, Abdel-Illah Mouaddib [Univ. Caen Basse-Normandie] , Jonathan Cohen [Univ. Caen Basse-Normandie] .
Many real-world multiagent applications, e.g., rescue operations, require to dynamically assemble or disassemble teams needed to provide a service based on agents entering or quitting the system. While Decentralized Partially Observable Markov Decision Processes (Dec-POMDPs) formalize decision-making by multiple agents, they fail to exploit the team flexibility. Queueing models can formalize birth-death processes by which agents enter or exit a team, but they fail to capture multiagent planning under uncertainty. This work, in the context of the PhD work of J. Cohen, introduces a new model synthesized from Dec-POMDPs and birth-death processes, called open Dec-POMDPs. The primary result is the proof that the latter is NEXP-Complete. Exploiting the team flexibility, enables us to present a best-response dynamics’ algorithm, which can dynamically adapt to agents entering or quitting a team and computes local optimum solutions.
Does randomization makes cooperative multi-agent planning easier?
Participant : Jilles S. Dibangoye.
These recent years have seen significant progress in multi-agent planning problems formulated as decentralized partially observable Markov decision processes (Dec-POMDPs). In state-of-the-art algorithms, agents use policies that do not employ random devices, i.e., deterministic policies, which are simple to handle and to implement, and yet are good candidates to be optimal. Integer linear programming (ILP) or constraint optimization programming (COP) can formalize the search for deterministic policies, unfortunately their worst case complexity (NP-Complete) suggest to be little hope for optimally solving real-world instances. In this paper, we show—for the first time—that the randomization allows us to use linear programming (LP) instead of ILP while preserving optimality, which drops the worst-case complexity from NP to P. Specifically, we introduce the first linear programs for incrementally approaching the optimal value function starting from upper- and lower-bound functions. We further extends state-of-the-art algorithm for Dec-POMDPs to use randomized policies. Finally, empirical results demonstrate significant improvements in time needed to find an ε-optimal solution on all tested benchmarks.
Reinforcement learning approach for active perception using multiple robots
Participants : Jilles S. Dibangoye, Jacques Saradaryan, Laëtitia Matignon, Trad Ahmed Yahia [Master Internship] , Lorcan Charonnat [Internship INSA] , Yuting Zhang [Internship INSA] , Yifan Xiong [Internship INSA] .
We consider cooperative, decentralized stochastic control problems represented as a decentralized partially observable Markov decision process. A critical issue that limits the applicability of that setting to realistic domains is how agents can learn to act optimally by interacting with the environment and with one another, given only an incomplete knowledge about the model. Reinforcement learning has previously been applied to decentralized decision making with a focus on distributed methods, which often results in suboptimal solutions. On the contrary, we build upon the idea that plans that are to be executed in a decentralized fashion can nonetheless be formulated in a centralized manner using a generative model of the environment. Following this line of thought, we propose the first (centralized) reinforcement learning algorithm for computing the optimal Q-value functions for cooperative, decentralized stochastic control problems. Experiments show our approach can learn to act optimally in many domains from the literature. We currently investigate robotic applications of this approach, including unknown scene reconstruction by a fleet of mobile robots.